多场景协作机器人仿真平台
多场景协作机器人仿真软件基于ROS Noetic系统,支持Python编程与UI操作,提供直观便捷的机器人与场景控制功能。
特征
多仿真场景
内置不少于10种仿真场景
多任务实验
支持超过30个接口函数及25个视觉任务实验
多传感器模块
配备四轮协作机器人和六轴机械臂,集成深度摄像头、激光雷达等高精度传感器
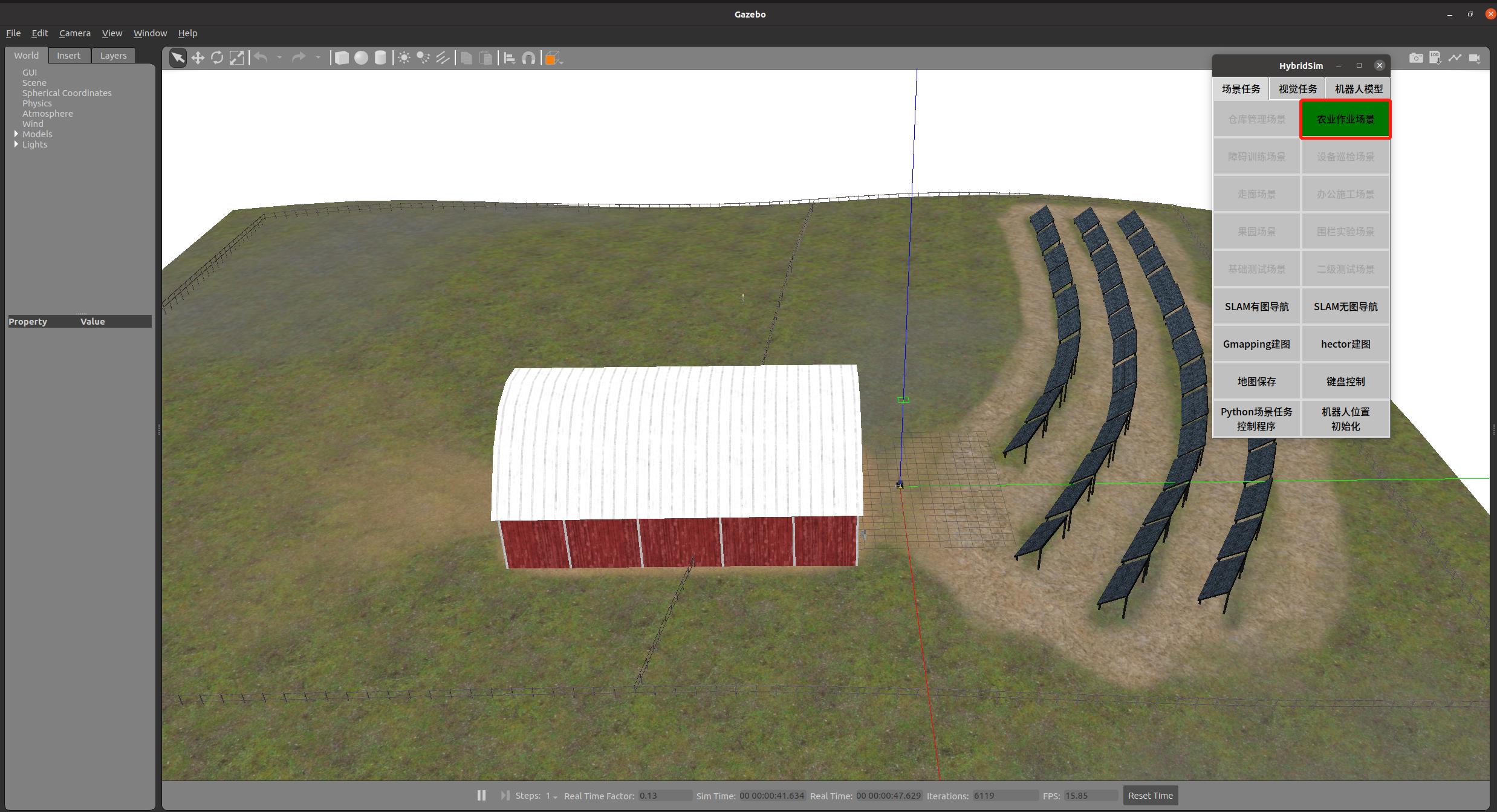
功能介绍
配备四轮协作机器人和六轴机械臂,集成深度摄像头、激光雷达等高精度传感器,结合深度学习与大规模数据模型,实现智能环境感知、SLAM导航与实时地图构建。内置不少于10种仿真场景,支持超过30个接口函数及25个视觉任务实验,涵盖颜色识别、图像处理、物体检测等前沿人工智能技术。平台支持基于神经网络的视觉任务执行,能够加载并展示多种机器人模型,具备仓库管理和智能闸门控制功能。平台适用于教学、科研与二次开发,提供基于大模型推理的自主决策能力,助力用户深入探索智能机器人与人工智能技术的融合,推动机器人系统的智能化、自动化进程。